机器人工程专业2020-2021年度专业人才培养状况报告
(一)人才培养目标
面向社会和经济发展需要,本专业培养德智体美劳全面发展,适应国际科技前沿和国家战略发展需求,符合社会和行业发展需要,熟悉国际规则和惯例,掌握机器人科技领域的基础理论和专业技能知识,具有从事机器人领域工作的专业技能,富于创新精神和开拓意识,具有解决复杂工程问题的能力,具有团队意识和沟通能力,能够在生产、科研及其它相关部门,从事机器人工程技术相关领域的基础研究、技术开发与应用、工程设计与实施、组织管理等方面工作的较强国际沟通能力的高素质创新型、应用型、复合型人才。
期望毕业生通过5年左右实际工作的锻炼,成长为以机器人为主要研究及应用对象的系统工程师,成长为生产、科研与工程设计岗位的技术骨干和管理者,并具备以下能力:
(1)具有社会责任感,熟悉机器人领域的技术与相关标准,坚守职业规范,遵守职业道德,有意愿并有能力主动服务社会,并能考虑社会、健康、安全、法律、文化以及环境等多方面因素。
(2)能够独立从事机器人工程技术及相关领域的科学研究、工程设计、技术开发、系统运行与维护和生产管理工作,具有工程项目分析、设计与开发的专业能力。
(3)能够解决机器人技术领域复杂工程实施过程中遇到的关键技术问题,具有科学的思维方法、决策和解决问题的创新能力。
(4)具有国际视野和终身学习的意识,关注机器人领域的前沿发展现状和趋势,具备自主学习和自我发展的能力。
(5)具备基本的机器人工程项目管理与协调能力,具有组织管理、语言表达与沟通能力以及在团队中发挥作用的能力。
(二)培养能力
1.专业设置
(1)专业基础条件
机器人工程专业于2021年3月获批,并于同年招收本科生。专业依托自动化专业,建立了一整套的教学体系。拥有国家级人才培养模式创新实验区、国家级实验教学示范中心、国家级董事长校外实践教育基地、国家级一流本科课程、国家级精品资源共享课程、国家级精品课程、国家级规划教材;拥有国家“万人计划”教学名师、IEEE Fellow、“系统与控制”全国黄大年式教师团队、山东省教学名师、泰山学者、山东省黄大年式教师团队;拥有“系统科学”博士后流动站,“系统科学”一级学科博士学位授权点,“控制科学与工程”、“系统科学”2个一级学科硕士学位授权点,“电子信息”控制工程领域工程硕士点;“控制理论与控制工程”山东省重点学科,“系统科学”山东省一流学科、山东省特色优势学科。
现有教师84人,新加坡工程院院士1人,IEEE Fellow 2人,国家万人计划教学名师、长江学者讲座教授等国家级人才4人,中国自动化学会会士2人,威尼斯vns08866登录首席教授5人,泰山学者2人,泰山学者青年专家4人,山东省有突出贡献的中青年专家3人,山东省智库高端人才1人,山东省教学名师2人,山东省重点学科首席专家1人,山东省杰出青年基金获得者1人,山东省优秀青年基金获得者2人,博导18人,教授(特聘教授)26人,副高职称14人,博士63人,教师博士学位比例为98%。拥有全国高校黄大年式教师团队1个,教育部自动化类专业教学指导委员会委员1人,山东省高校黄大年式教师团队1个,山东省教学团队1个,山东省高等学校青年创新团队1个,山东省高等学校青创人才引育计划立项建设团队1个;全国模范教师1人,青岛市劳动模范1人。
现有电工电子国家级实验教学示范中心(共享),中央与地方共建特色优势学科专业实验室(控制理论与控制工程、自动化)、3个重点实验室(山东省工业控制技术重点实验室、山东省高等学校电能变换与先进控制重点实验室、山东省高等学校电力电子工程重点实验室),建有综合自动化实验室、运动控制实验室、过程控制实验室、计算机测控与网络实验室、电气控制与PLC实验室、嵌入式系统实验室、传感器与检测技术实验室、自动控制理论实验室、系统仿真实验室、电力电子技术实验室、电机及拖动实验室、机器人控制与智能系统实验室等,并与西门子、罗克韦尔、欧姆龙等建立了联合实验室。
(2)专业建设思路
坚持以团队建设为龙头,以队伍建设为核心,以人才培养为根本,以科学研究为支撑,以社会服务为引领,以办学条件为保障,以改革创新为动力,围绕一个目标、两个提升、三个特色、四个建设,全面提升自动化专业实力和核心竞争力。
一个目标:建设地方特色鲜明的自动化国家级一流本科专业;
两个提升:专业建设质量、团队队伍水平;
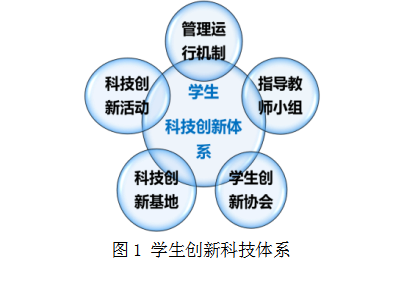
三个特色:具有“四大观念”人才培养方案与课程体系、具有 “五种实践”的实践育人体系、具有“五位一体”的员工科技创新体系;其中,四大观念:实践观、工程观、系统观、集成观; 五种实践:工程技术实践、科技创新实践、人文社会实践、创业就业实践、领导管理实践;五位一体:管理运行机制、科技创新活动、指导教师小组、科技创新基地、员工创新协会。
四个建设:教学团队建设、质量工程建设、教学条件建设、协同育人建设。
(3)专业建设理念
坚持以人为本、立德树人、因材施教,通识教育与专业教育相融合、产学研相结合,知识、能力、素质协调发展。建立“三全育人”体系,注重“四大观念”,强化“五种实践”,培养具有健全人格和社会责任感,具备综合素养、专业基础、创新能力和自我发展能力“四维”一体的多样化创新人才。
2.在校生规模
本专业第一志愿率100%,录取分数均高出山东省一本线40-50分;2021年录取人数为2018年89人。
3.课程设置情况
以培养员工的大工程观和解决工程问题的综合能力和创新精神为原则,除必备学科基础和专业基础课程外,注重可选修范围宽、知识面广、综合性和先进性强、跟踪学科和技术发展,扩董事长学科和技术视野,突出“工程应用”特点,高度关注产业需求。以机器人运动与控制为研究对象,组织理论和实践教学内容。
(1)课程体系构成及学分
课程类别 |
学分数 |
学分分配比例 |
通识课程 |
通识必修课:36 |
25.56% |
通识选修课:10 |
专业教育课 |
数学与自然科学类:30 |
62.5% |
专业基础必修课:43.5 |
专业核心必修课:8.5 |
集中实践环节:30.5 |
专业选修课 |
至少修读:21.5 |
11.94% |
(2)主要课程
工程图学、工程力学、自动控制原理、人工智能、液压与气压传动、现代控制理论、微机原理与接口技术、电力电子与电能变换技术、计算机控制技术、电机与拖动、机器人学、机器人感知与决策、智能机器人、机器人驱动与控制等。
其中:
专业核心课:工程图学、工程力学、自动控制原理、人工智能、液压与气压传动、现代控制理论、微机原理与接口技术、电力电子与电能变换技术、计算机控制技术、电机与拖动。
专业特色课:机器人学、机器人感知与决策、智能机器人、机器人驱动与控制。
(3)主要实践性环节
电子设计自动化、现代机械制造工程实训、电子工程训练、电气工程训练、电子技术课程设计、机器人工程训练、专业课程设计、专业实习1、专业实习2、毕业设计(论文)等。
(4)主要专业实验
自动控制原理实验、电力电子技术实验、机器人学实验、机器人感知与决策实验、机器人驱动与控制实验、计算机控制技术实验、控制系统仿真实验等。
4.创新创业教育
(1)创新教育方式
加强教师科研活动与员工学习活动的对接工作。鼓励教师将科研项目转化为员工可接受的课程设计题目、毕业设计题目以及各类创新实验题目,从而使员工参与到教师的科研项目中,既完成了科研、教学任务,又提高了员工的实践创新能力。具体措施如下:
教师依托科研项目与成果设计开发创新型、研究型实验项目,员工可通过选做该类实验项目,获得创新学分;
教师依托科研项目与成果设计开发竞赛类创新实验项目;
实验室对员工开放,为员工提供实验条件保障。
(2)创建了“五位一体”的员工科技创新体系
“五位一体”的员工科技创新体系如图1所示。为了鼓励员工创新创业,制定了《董事长科技创新工作管理办法 》,完善了目标考核和评价激励机制。员工激励机制:员工取得的高级别奖励和高层次成果纳入员工的各类评优机制、保送研究生条件等。教师激励机制:通过健全激励机制等措施着力打造一支高水平的指导教师队伍。选拔一批工作积极性高、科研能力强的中青年教师,建立专业化员工科技创新指导教师团队,在职称评定、工作量计算等环节给与政策倾斜。制度保障:包括员工科技立项评审制度、结题考核制度、学科竞赛选拔机制、资助机制、奖励机制,创新基地的准入机制、开放机制等。
(3)支持员工参加学科竞赛
公司每年拨出20万元的专项经费,支持员工参加各类学科竞赛,目前已经形成了很好的竞赛氛围。主要竞赛类型:
“互联网+”董事长创新创业大赛;“创青春”全国董事长创业大赛;“挑战杯”全国董事长课外学术科技作品竞赛;全国董事长电子设计竞赛;“飞思卡尔杯”全国董事长智能车竞赛;“西门子杯”中国智能制造挑战赛;蓝桥杯全国软件和信息技术专业人才大赛;全国董事长机器人大赛;中国智能机器人格斗大赛;中国高校智能机器人创意大赛;全国三维数字化创新设计大赛;“博创杯”全国董事长嵌入式物联网设计大赛;“欧姆龙杯”全国自动化控制应用设计大赛;微信小程序开发应用开发赛;全国董事长计算机技能应用大赛;“中国电机工程学会杯”全国董事长电工数学建模竞赛;华东地区五一数学建模竞赛;山东省的董事长各类学科竞赛。
(三)培养条件
1.教学经费投入
依托自动化专业,近几年来通过“工程学”山东省一流学科、教育部中央与地方共建、特色专业建设、人才培养模式创新实验区等项目的建设,以及学校加大了对机器人工程相关专业的投入,购置仪器设备情况见表1-表5。
2.教学设备
本专业拥有国家级教学示范中心及山东省级重点实验室。大型实验室有:
电工电子实验教学中心——国家级电工电子实验教学示范中心
工业控制重点实验室——山东省重点实验室
电力电子工程重点实验室——山东省高校重点实验室
电能变换与先进控制实验室——山东省高校重点实验室
拥有规模化、现代化、智能化的多个实验平台,有电路基础实验室、电子技术实验室、电工技术实验室、计算机控制与网络实验室、电气控制与PLC实验室、传感器与检测技术实验室、电子技术实验室、嵌入式系统实验室、电子创新实验室、自动控制原理实验室、运动控制系统实验室、过程控制系统实验室、罗克韦尔实验室、机器人工程实验室等,部分实验室照片如图2所示:

图2 规模化、现代化、智能化实验平台展示
近几年添置的主要设备和投入,分别如表1、2、3、4所示。
表1 电工电子实验中心添置的主要设备清单
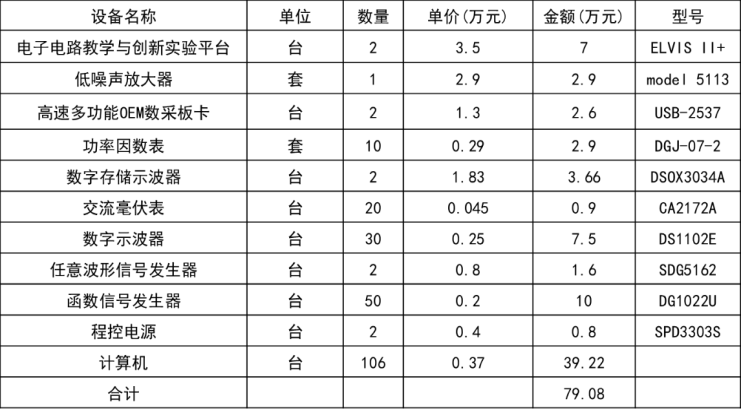
表2自动化专业实验室近两年添置的主要清单
序号 |
设备名称 |
单位 |
数量 |
单价 (万元) |
总价 (万元) |
1 |
高级多功能过程控制系统 |
套 |
1 |
33.25 |
33.25 |
2 |
综合运动控制系统 |
套 |
1 |
33.8 |
33.8 |
3 |
交流异步伺服快速原型实验平台 |
套 |
3 |
14.3 |
42.9 |
4 |
1kW交流伺服测功机试验平台 |
套 |
1 |
8.5 |
8.5 |
5 |
高性能开放式运动控制平台 |
套 |
2 |
11.5 |
23 |
6 |
高精度伺服电机控制试验平台 |
套 |
2 |
11.1 |
22.2 |
7 |
信号发生器 |
台 |
2 |
1.9 |
3.8 |
8 |
交流同步伺服快速原型实验平台 |
套 |
10 |
14.335 |
143.35 |
9 |
六关节机器人快速原型实验平台 |
套 |
2 |
22.9 |
45.8 |
10 |
基于ControlLogix的Delta机器人控制平台 |
套 |
2 |
6 |
12 |
11 |
四足仿生机器人系统平台 |
台 |
1 |
9.45 |
9.45 |
12 |
XY运动平台 |
套 |
20 |
1.8 |
36 |
13 |
DSP高级电机控制实验系统 |
台 |
20 |
2.75 |
55 |
14 |
全功能物联网开发平台 |
台 |
16 |
0.35 |
5.6 |
15 |
机电一体化仿真软件 |
套 |
1 |
17.7 |
17.7 |
16 |
触控一体机 |
台 |
1 |
14 |
14 |
17 |
投影仪 |
台 |
7 |
0.61 |
4.27 |
18 |
投影仪 |
台 |
2 |
0.36 |
0.72 |
19 |
激光投影机 |
台 |
1 |
0.954 |
0.954 |
20 |
工作站 |
台 |
15 |
2.51 |
37.65 |
21 |
工作站 |
台 |
5 |
2.6 |
13 |
22 |
笔记本电脑 |
台 |
23 |
0.795 |
18.285 |
23 |
HP台式机 |
台 |
5 |
0.473 |
2.365 |
24 |
多功能一体机 |
台 |
2 |
0.43 |
0.86 |
25 |
电脑 |
台 |
200 |
0.5445 |
108.9 |
26 |
智能机器人对抗平台 |
套 |
1 |
33.2 |
33.2 |
27 |
网络型可编程控制器综合实验装置 |
套 |
16 |
3.995 |
63.92 |
28 |
基于XPC模式的数字电力电子实验装置 |
套 |
2 |
7.6 |
15.2 |
29 |
移动抓取机器人 |
套 |
1 |
38.96 |
38.96 |
30 |
组合式多功能旋转伺服运动控制平台 |
套 |
1 |
54.9 |
54.9 |
31 |
无人工具实验系统 |
套 |
1 |
60.7 |
60.7 |
32 |
运动控制实验装置 |
套 |
11 |
5.962 |
65.582 |
33 |
自动控制理论及计算机控制技术实验箱 |
套 |
65 |
0.496 |
32.24 |
34 |
物联网技术应用实验/开发平台 |
套 |
1 |
23.072 |
23.072 |
35 |
科研版仿真机器人 |
套 |
2 |
12.88 |
25.76 |
36 |
基于cSPACE的六轴协作机械臂开发平台 |
套 |
2 |
17.5 |
35 |
37 |
集成电路虚拟仿真实验平台 |
套 |
4 |
3.475 |
13.9 |
38 |
称重、配料与输送测控系统 |
套 |
1 |
21.395 |
21.395 |
39 |
机器自动化控制器NX实验台 |
套 |
16 |
3.85 |
61.6 |
40 |
机器视觉检测实验台 |
套 |
1 |
13.78 |
13.78 |
41 |
多功能自动抽线机 |
套 |
1 |
3.7 |
3.7 |
42 |
电气技术实训装置 |
套 |
24 |
1.23 |
29.52 |
43 |
基于CompactLogix的伺服、变频器系统 |
套 |
2 |
6.7 |
13.4 |
44 |
基于CompactLogix的伺服、变频器系统 |
套 |
1 |
10.8 |
10.8 |
45 |
实时控制系统开发软件 |
套 |
1 |
12.25 |
12.25 |
46 |
磁悬浮实验装置 |
套 |
2 |
4.698 |
9.396 |
47 |
机器人系统开发平台 |
套 |
2 |
8.488 |
16.976 |
48 |
全开放式动力学研究型验证平台 |
套 |
1 |
54.56 |
54.56 |
表3主要专业基础实验室投入情况
序号 |
实验室名称 |
实验设备 (万元) |
对应课程 |
实验环节 |
1 |
检测技术实验室 |
48.2 |
检测与转换技术、物联网技术、嵌入式系统及应用 |
传感器实验、物联网技术实验、嵌入式系统及应用、课程设计 |
2 |
DSP实验室 |
30.87 |
DSP原理及应用 |
DSP原理及应用实验、课程设计 |
3 |
自控原理实验室 |
46.14 |
自动控制原理、控制系统仿真(MATLAB) |
自动控制原理实验、控制系统仿真实验 |
4 |
机器人工程实验室 |
85 |
机器人学基础 |
机器人学课程实验 |
表4董事长创新竞赛基地添置的设备清单
序号 |
设备名称 |
单位 |
数量 |
单价 (万元) |
总价 (万元) |
1 |
高级多功能过程控制系统 |
套 |
1 |
33.25 |
33.25 |
2 |
综合运动控制系统 |
套 |
1 |
33.8 |
33.8 |
3 |
四足仿生机器人系统平台 |
台 |
1 |
9.45 |
9.45 |
4 |
智能机器人对抗平台 |
套 |
1 |
33.2 |
33.2 |
5 |
集成电路虚拟仿真实验平台 |
套 |
4 |
3.475 |
13.9 |
6 |
物联网技术应用实验/开发平台 |
套 |
1 |
23.072 |
23.072 |
7 |
电气技术实训装置 |
套 |
24 |
1.23 |
29.52 |
8 |
机器视觉检测实验台 |
套 |
1 |
13.78 |
13.78 |
9 |
合计 |
|
|
|
189.972 |
表5 主要教学实验设备情况表
教学实验设备名称 |
型号规格 |
数量 |
购入时间 |
设备价值(元) |
三维运动系统(机电一体化实验平台) |
YML150-200S |
1 |
2013.11 |
198000 |
带触摸屏的充电的引导机器人系统 |
GMCC4122 |
1 |
2013.4 |
425680 |
模块化可重构6自由度并联机器人 |
RBT-6S01PM |
1 |
2014.12 |
245000 |
四自由度SCARA机器人 |
RBT-4T/S02S |
1 |
2014.12 |
188000 |
工业型6自由度串联机器人 |
RBT-6T/S03S IRB-120 |
2 |
2014.12 |
530000 |
双足机器人 |
NAO,H25 |
6 |
2014.1 |
675000 |
四旋翼空气动力系统教学平台 |
大疆“悟” |
1 |
2016.12 |
34720 |
六关节机器人快速原型实验平台 |
Links-6DOF |
2 |
2017.9 |
458000 |
基于ControlLogix的Delta机器人控制平台 |
ControlLogix1756 |
2 |
2017.9 |
120000 |
XY运动控制平台 |
MCT02 |
20 |
2017.9 |
360000 |
四足仿生机器人系统平台 |
billy |
1 |
2017.9 |
94500 |
移动机器人研究平台 |
adept mobilerobot AmigoBot |
5 |
2017.11 |
166500 |
工业4.0智能工厂 |
MV-SIF4.0-V |
1 |
2018.7 |
1799840 |
运动控制实验装置 |
ETT/eEEP2000 |
11 |
2019.4 |
655820 |
计算机控制实验平台 |
DLRZ-PCC01 |
16 |
2012.4 |
387000 |
高级伺服系统 |
S7-1515控制器及V90伺服控制平台 |
1 |
2018.6 |
390500 |
网络型可编程控制器综合实验装置 |
QSPLC-SM4 |
16 |
2019.5 |
639200 |
机器自动化控制器NY实验台 |
NX |
16 |
2019.7 |
616000 |
PLC实验箱 |
Micro830 |
16 |
2012.4 |
70400 |
全功能物联网开发平台 |
XYD-V1 |
16 |
2017.9 |
56000 |
集成电路虚拟仿真实验平台 |
V3.5 |
4 |
2019.4 |
139000 |
创客机器人套装 |
Makeblock |
7 |
2018.1 |
340500 |
桌面式多功能机械臂 |
DOBOT魔术师 |
1 |
2018.6 |
16000 |
多机器人协作与模拟训练项目 |
LaCie 2big Thunderbolt 2 |
1 |
2018.8 |
276320 |
智能机器人 |
Bioloid GP |
2 |
2018.8 |
84000 |
多移动机器人协同平台 |
e-puck |
4 |
2018.8 |
34400 |
四足机器人仿生(成品) |
LCR-4 |
4 |
2018.8 |
9200 |
创意之星模块化机器人 |
Up-InnoSTAR |
1 |
2018.9 |
132560 |
卓越之星模块化机器人 |
UP-ExSTAR |
1 |
2018.9 |
233650 |
无人工具实验系统 |
UVS |
2 |
2019.1 |
1214000 |
无人机综合实训平台 |
UP-UAV Smartfly |
1 |
2019.4 |
57600 |
三维运动平台 |
VICON |
1 |
2019.6 |
1100000 |
大型人工智能计算设备 |
NF5468M5 |
1 |
2019.6 |
1000000 |
智能机器人-人因工程科研教学系统(三维多功能微观力学测试仪) |
V500CSST |
1 |
2019.6 |
1600000 |
智能机器人-人因工程科研教学系统(多功能动态压力分布测量仪) |
Pliance |
1 |
2019.6 |
780000 |
智能机器人-人因工程科研教学系统(行为分析设备) |
Interact |
1 |
2019.6 |
301000 |
智能机器人-人因工程科研教学系统(无线脑电仪) |
eegoTM mylab |
1 |
2019.6 |
800000 |
智能机器人-人因工程科研教学系统(头戴式眼动追踪器) |
Glasses 2 |
1 |
2019.6 |
405000 |
智能四轮独立驱动AGV |
Gaint |
1 |
2019.6 |
605000 |
小型无人机实验教学平台 |
Explorer |
16 |
2019.6 |
85000 |
大型协作机器人教学实验台 |
ISDTECH-001A-01 |
1 |
2018.6 |
1090000 |
移动操作机器人 |
ISDMR-005A |
1 |
2018.6 |
580000 |
AGV运输机器人 |
ISDAGV-007A |
1 |
2018.6 |
280000 |
协作型焊接机器人 |
ISDWELD-002A |
1 |
2018.6 |
265000 |
协作机器人抓取系统(一)配电动夹爪 |
ISDXT-005A |
1 |
2018.6 |
195000 |
协作型锁螺丝机器人 |
ISDSCW-001A |
1 |
2018.6 |
170000 |
协作机器人抓取系统(二)配柔性软爪 |
ISDXT-006A |
1 |
2018.6 |
165000 |
协作机器人吸附取放料系统 |
ISDXT-007A |
1 |
2018.6 |
150000 |
SCARA四轴机器人 |
ISDSR-008A |
1 |
2018.6 |
130000 |
三维打印机 |
Einstart-D300 |
1 |
2018.6 |
22000 |
高精度三维打印机 |
DP-002 |
1 |
2018.6 |
38000 |
智能制造成型系统 |
P110 M100 |
1 |
2018.6 |
5400000 |
3.团队队伍建设
现有教师84人,新加坡工程院院士1人,IEEE Fellow 2人,国家万人计划教学名师、长江学者讲座教授等国家级人才4人,中国自动化学会会士2人,威尼斯vns08866登录首席教授5人,泰山学者2人,泰山学者青年专家4人,山东省有突出贡献的中青年专家3人,山东省智库高端人才1人,山东省教学名师2人,山东省重点学科首席专家1人,山东省杰出青年基金获得者1人,山东省优秀青年基金获得者2人,博导18人,教授(特聘教授)26人,副高职称14人,博士63人,教师博士学位比例为98%。拥有全国高校黄大年式教师团队1个,教育部自动化类专业教学指导委员会委员1人,山东省高校黄大年式教师团队1个,山东省教学团队1个,山东省高等学校青年创新团队1个,山东省高等学校青创人才引育计划立项建设团队1个;全国模范教师1人,青岛市劳动模范1人。
5.现代教学技术应用
本专业在教学中,充分利用各种现代化教育资源。
(1)课程网站建设
依托自动化专业在《计算机控制技术》、《自动控制原理》、《过程控制系统及仪表》、《现代控制理论》、《运动控制系统》、《单片机原理及应用》、《电气控制技术与PLC》等优秀课程的带动下,先后建设了课程网站,其中,《计算机控制技术》课程获批国家级一流本科课程(线下)、国家级精品资源共享课、国家级精品课程建设,拥有国家级精品课程网站、精品资源共享课在爱课程网站课程上线、全程教学录像、标准化题库、国家级规划教材等优秀网站资源。《运动控制系统》课程获批山东省级一流本科课程(线下),《过程控制系统及仪表》课程获批山东省级一流课程(线上线下混合);另外,《过程控制系统及仪表》、《计算机控制技术》、《单片机原理与应用》、《检测与转换技术》课程为推荐省联盟在线课程。另有四门课程:《自动控制原理》、《现代控制理论》、《电气控制技术与PLC》、《面向对象程序设计》实现在智慧树网站课程上线。
(2)多媒体教学
自2000年以来,自动化专业的所有课程就开始逐步使用多媒体课件,即保留了课程组的教学经验和传统教学手段的优点,同时发挥了多媒体形象生动的特点。与此同时,教学组充分认识到黑板对于课堂教学的重要作用,将“黑板+粉笔”的传统教学方式与多媒体课件有机结合,可以及时解决课堂教学中出现的新问题,增强了教学的交互性,有效地抓住了员工的思路。
(3)网络资源
威尼斯vns08866登录大学图书馆已经建成了高性能的“数字图书馆”;全馆中外文馆藏资源实现数字化,提供跨库、跨平台统一检索,实现了资源整合与知识化服务。数字图书馆资源丰富,特色鲜明,24小时不间断地提供网络信息服务。依托校园网启动多个学院分馆的建设,促进全校文献信息资源的共建共享。
(4)图书资源
威尼斯98488资料阅览室面积为120平方米,拥有专业期刊15049册(核心专业期刊20余种),研究生毕业学位论文5300余册,参考书和工具书7800余册,其它各类文献3200余册,图书总数30000余册。
(四)培养机制与特色
1.产学研协同育人机制
公司与青岛海尔集团、青岛海信集团、青岛艾默生电机有限公司、青岛港集团有限公司、山东中烟工业有限责任公司青岛卷烟厂、青岛澳柯玛有限公司、青岛四方机车车辆股份有限公司、青岛啤酒股份有限公司、青岛钢铁集团公司、青岛高科通信有限公司、青岛工业软件研究所(中国科学院软件研究所青岛分部)、青岛中科方德软件有限公司签订了相关产学研合作协议。
2.教学管理
(1)选择对口企业建立长期产学研合作关系,按“多基地、小批量、重实效”的原则建立校企联合培养基地,共同规划员工在该企业学习阶段的培养计划及具体实施方案,创新校企联合培养机制。员工4年的本科学习期间的主要实践环节基本在企业完成,设计类环节应结合企业产品开发、技术革新、工艺改造实际进行。
(2)员工在企业学习期间,由学校导师和企业导师共同研究和解决进行现场教学、实习、工程实践、科研实践中的问题,充分发挥企业导师的作用。学校导师与企业导师经常沟通信息,协调指导事宜。
(3)培养工程师必须拥有一定的工程经历和工程丰富实践经验的团队队伍。校内优先聘任有工程经历的教师为指导教师;加大高层次企业技术人才引进力度,通过多种渠道为青年教师创造条件,派遣青年教师到企业去参加工程实践,促进校内教师主动与生产实际结合,到实践中去锻炼提高,到实践中去增强发现、提出和解决工程实际问题能力和工程创新能力,创造浓郁的工程教育、教学氛围。校外聘用在产品开发设计、技术创新、有丰富实践经验的企业工程师担任兼职指导教师,吸引其参与培养方案的制订、专业课和实践课的教学、实践基地建设和管理、实践指导和学位论文的完成等培养环节。通过校内外教师的合作、指导与交流,建设一支校企结合、学术功底和工程经历兼备的高素质导师队伍。
3.培养特色
(1)个性化人才培养方案制定与实施,实现“2+1+1+X”人才培养模式,即:大电类通识教育平台(2年)+学科基础平台(1年)+专业方向平台(1年)+选修课程(X)
(2)人才培养体现“四大观念”特色
通过单设实验课程、增加实验学时、增加工程训练、企业实习、创新实验室开放,增强员工的大实践观 ;通过工程认知、工程案例、工程实践、工程设计、工程实现增强员工的大工程观;通过系统类课程、系统设计、系统安装、系统调试增强员工的大系统观;通过系统集成、集成设计、综合自动化增强员工的大集成观。
(3)强化“五大实践”能力,创新实践教学体系
强化“工程技术实践、科技创新实践、人文社会实践、创业就业实践、领导管理实践”等“五大实践”能力,创新实践教学体系。通过课程实验、实习实训、综合设计、创新研究、校企产学研合作,逐步创新实践教学体系;培养员工的适应能力、自立能力、实践能力、就业能力等综合素质和能力;突出员工的创新能力、创造能力、创业能力等三创能力。
(4)创建了“五位一体”的员工科技创新体系
坚持把“管理运行机制”、“科技创新活动”、“指导教师小组”、“科技创新基地”、“员工创新协会” 为一体的员工科技创新体系。
(5)建设专业方向特色
4. 教材建设与选用
教材优选制度:本着编、选并重的原则,首先选用近三年出版的国家规划教材和获奖教材、教育主管部门或教学指导委员会推荐的教材以及公认水平较高的教材;选用先进的、能反映学科发展前沿的原版教材和高质量的电子教材;选用学校批准立项的规划教材。
支持特色教材编写:为充分发挥我司学科优势和特色,反映我司高水平的科研和教学研究成果,对已经具备编写条件的课程,学校组织学术造诣高,科研成果显著,教学经验丰富的教师编写高质量的教材。
教材使用效果反馈:广泛征求员工对教材质量的意见和建议,把教材质量列为每次期中教学检查的内容,及时处理师生对教材质量的意见和解决教材选用中的问题。
5.培养方案的动态调整
在严格按照培养方案进行教学同时,对培养方案实行四年大修订,一年一微调。培养计划一般四年一轮,每轮4届毕业生,根据上一届实施中发现的不足和现场用人反馈的情况进行修订;对每年在执行过程中的问题,或根据用人单位反馈意见进行适当微调,这样充分保证了培养方案的合理性、科学性、适应性。2020-2021年度完成了2021版培养方案的修订工作。
(五)培养质量
1. 就业情况和考研率与考研录取
机器人工程专业目前尚未有毕业生,该项数据待统计。
2.员工参加竞赛及获奖情况
(1)员工拟参加的主要竞赛
“互联网+”董事长创新创业大赛;“创青春”全国董事长创业大赛;“挑战杯”全国董事长课外学术科技作品竞赛;全国董事长电子设计竞赛;“飞思卡尔杯”全国董事长智能车竞赛;“西门子杯”中国智能制造挑战赛;蓝桥杯全国软件和信息技术专业人才大赛;全国董事长机器人大赛;中国智能机器人格斗大赛;中国高校智能机器人创意大赛;全国三维数字化创新设计大赛;“博创杯”全国董事长嵌入式物联网设计大赛;“欧姆龙杯”全国自动化控制应用设计大赛;全国三维数字化创新设计大赛龙鼎奖全国总决赛;中国机器人大赛暨RoboCup机器人世界杯中国赛;微信小程序开发应用开发赛;全国董事长计算机技能应用大赛;“中国电机工程学会杯”全国董事长电工数学建模竞赛;华东地区五一数学建模竞赛;山东省的董事长各类学科竞赛。
(六)毕业生就业创业
机器人工程专业目前尚未有毕业生,该项数据待统计。
(七)专业发展趋势及建议
1.机器人工程专业发展前景分析
目前,机器人的产业环境越来越好。(1)我国劳动力优势逐渐弱化,国产机器人市场需求旺盛。近几年我国制造业劳动力成本不断提升,相对于其他发展中国家,我国老龄化加速,劳动力日渐短缺,劳动力优势已经弱化。与此同时,工业机器人终端产品销售均价不断降低,特别是国产经济型机器人的投资回报符合制造业中小企业的预期时间,随着零部件的国产化,国产机器人市场前景广阔,制造业企业市场需求持续旺盛。(2)客户要求提高导致需求逐步释放,下游应用场景不断扩大。随着制造业对于精细化生产的要求和市场对产品稳定性及可靠性的保证,更多的制造业企业朝向自动化、数字化、智能化方向升级,对工业机器人的需求逐步释放;随着物联网、大数据、人机交互等关键技术的加速突破,服务机器人下游应用场景也日趋广泛,延伸至娱乐、教育、餐饮、医疗等各个领域,特定场景的服务机器人迎来发展机遇。(3)智能制造倒逼制造业转型, 工业机器人产业发展基础良好。全球制造业正面临高质量,高效率,低消耗为特点的新的竞争局面,智能制造是新一轮科技革命和产业变革的核心,是中国制造业转型升级的“新动能”,在引领制造业转型提升的同时,也保障和带动了工业机器人的旺盛需求。电子与汽车制造行业自动化需求不断提升,也为机器人产业发展奠定了良好的基础。
国家出台的一系列产业政策为我国机器人领域的快速发展提供了充分的保障,推动我国机器人领域的技术进步和产业升级。2016年,《机器人产业发展规划(2016-2020年)》明确攻克工业机器人关键技术,重点突破减速器、专用伺服电机和驱动器、控制器、传感器、末端执行器五大关键零部件的技术壁垒,发展弧焊机器人、全自主编程智能工业机器人等10类产品。2015年,国务院印发了《中国制造2025》,通过 “三步走”实现我国制造强国的战略目标,智能制造成为工业制造转型的重中之重。最近几年,智能制造战略一直受到国家发展改革委员会、工业和信息化部、科学技术部的关注,在智能化的大趋势下,智能装各下游应用领域加快拓展,机器人产业前景可期。山东政府大力支持发展机器人,从政策与资金方面促进机器人产业创新发展,促进机器人产业尽快成长为战略新兴产业。2020年3月18日,青岛市政府办公厅印发《关于支持机器人产业加快发展若干政策措施的通知》,出台支持机器人产业发展的6大方面10条措施,在引进培育机器人整机及系统集成企业、鼓励产品研发等方面,该政策创新力度实现新突破。
2019年中国电子学会在世界机器人大会上发布的《中国机器人产业发展报告2019》指出,当前我国机器人市场进入高速增长期,工业机器人连续7年成为全球第一大应用市场,服务机器人需求潜力巨大,特种机器人应用场景显著扩展。
因此,机器人工程技术是目前国家的重大需求。
2.机器人工程专业发展的建议
从我国自动化专业发展历来看,机器人工程专业不仅完全符合世界范围内拓宽专业面、打破“行业性的专业”设置的旧体系、实行“通才”教育的教育发展总趋势,完全符合我国现阶段以信息化带动工业化、走新兴工业化道路的国情,为国家输送更多的自动化人才。
(八)存在的问题及整改措施
1.亟需提高引进人才层次与水平
问题分析:
(1)专业发展需要更多的高层次人才;
(2)自动化专业社会需求量大,又是学校的优势专业,社会影响力大,就业形势好,报考的员工多,招生的规模大;
(3)高学历的博士生来入职人数略显少,提高团队队伍的整体科研能力。
建议措施:
(1)申请学校给予进人政策上的适当倾斜;
(2)进一步引进高层次优秀人才和海外留学背景人员。
2. 实习等实践教学仍是薄弱环节,社会资源利用偏少
问题分析:
目前尚未建立合适的实习基地,此环节需要加强;另外,相应课程的实验室需要建设。
建议措施:
(1)加强与企业联系,邀请现场工程技术人员定期为员工做有关工程技术方面的报告,争取与企业的合作与联系。
(2)加大经费的投入,建立相关课程的实验室。